 Não está muito distante o tempo em que pessoas com deficiências físicas e incapazes de se locomover sem cadeira de rodas poderão andar e até subir escadas. Para isso, elas contarão com o auxílio de exoesqueletos robóticos, estruturas rígidas, feitas geralmente de metal e plástico, projetadas para auxiliar o movimento humano. Esses equipamentos vêm sendo desenvolvidos em várias partes do mundo, inclusive na Escola Politécnica da Universidade de São Paulo (Poli-USP). Uma equipe coordenada pelo professor Arturo Forner-Cordero começou este ano um projeto financiado pela FAPESP para desenvolver um exoesqueleto para o braço e outro projeto, financiado pelo CNPq, para criar um exoesqueleto para a perna.
Não está muito distante o tempo em que pessoas com deficiências físicas e incapazes de se locomover sem cadeira de rodas poderão andar e até subir escadas. Para isso, elas contarão com o auxílio de exoesqueletos robóticos, estruturas rígidas, feitas geralmente de metal e plástico, projetadas para auxiliar o movimento humano. Esses equipamentos vêm sendo desenvolvidos em várias partes do mundo, inclusive na Escola Politécnica da Universidade de São Paulo (Poli-USP). Uma equipe coordenada pelo professor Arturo Forner-Cordero começou este ano um projeto financiado pela FAPESP para desenvolver um exoesqueleto para o braço e outro projeto, financiado pelo CNPq, para criar um exoesqueleto para a perna.
Segundo o pesquisador, que lidera o Laboratório de Biomecatrônica do Departamento de Engenharia Mecatrônica e de Sistemas Mecânicos da Poli, os equipamentos serão capazes de amplificar o movimento de pacientes que apresentam alguma contração muscular, mas não conseguem fazer movimentos com o membro. Ou impor movimentos pré-definidos a pessoas que não tenham nenhuma capacidade de contração muscular.
O projeto constitui a primeira fase de uma linha de pesquisa de longo prazo, destinada aos estudos neuromotores auxiliados por exoesqueleto. “Nesta fase, o objetivo é a modelagem de um sistema do controle motor humano biomimético, que será validado com um dispositivo robótico (exoesqueleto) do membro superior”, explica Forner-Cordero. “Depois, ele será integrado a um sistema de eletromiografia (EMG) e outro de representação visual para que realizemos os experimentos.” Com isso, os pesquisadores esperam obter informações sobre diferentes níveis de controle para o sistema motor humano, como a modulação dos reflexos e a integração das informações sensoriais.
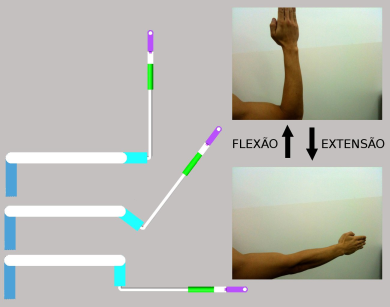
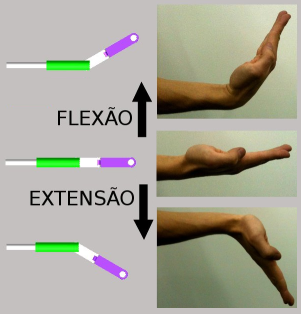
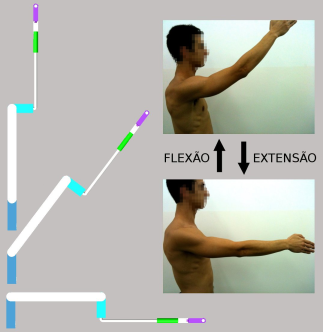
De acordo com Forner-Cordero, o desafio científico do projeto consiste em determinar e validar uma arquitetura de controle do sistema motor que seja biologicamente plausível. “Precisamos compreender como funciona o controle motor humano para interagir mais eficientemente e fixar os mecanismos de transferência de informação entre o homem e o robô”, explica. Além disso, há os desafios tecnológicos, como o projeto e a fabricação de exoesqueletos robóticos do braço, atuando sobre as articulações do ombro, cotovelo e punho; e o da perna, atuando sobre joelho e tornozelo.
 A necessidade de encontrar fontes de energia, como baterias de baixo peso, mas com grande autonomia, e motores de baixo consumo, mas com a potência suficiente para mover um membro humano, são outros obstáculos a serem superados. A ideia é copiar os mecanismos da natureza para melhorar a estabilidade do movimento e reduzir o custo energético – por isso, os exoesqueletos que estamos desenvolvendo se chamam biomiméticos.
A necessidade de encontrar fontes de energia, como baterias de baixo peso, mas com grande autonomia, e motores de baixo consumo, mas com a potência suficiente para mover um membro humano, são outros obstáculos a serem superados. A ideia é copiar os mecanismos da natureza para melhorar a estabilidade do movimento e reduzir o custo energético – por isso, os exoesqueletos que estamos desenvolvendo se chamam biomiméticos.
Forner-Cordero explica que quando o ser humano caminha usa a chamada dinâmica passiva do movimento – um mecanismo inconsciente que poupa os músculos nessa atividade. “O resultado é que gastamos menos energia”, diz o pesquisador. “Com aproximadamente a energia que gastamos para andar 1.400 metros, os robôs bípedes atuais caminhariam por volta de 30-50 metros. Agora, nós estamos tentando entender como o nosso corpo faz isso, para aplicar ao exoesqueleto robótico e, futuramente, a uma nova geração de robôs bípedes.”
Formado em “Ingeniería Superior de Telecomunicaciones” pela Universidade Politecnica de Valencia, Espanha, Forner-Cordero tem doutorado em Mechanical Engineering (Biomechanics) pela Twente University of Technology nos Países Baixos e pós-doutorado na Katholieke Universiteit Leuven em Bélgica. Antes de chegar à Poli, ele trabalhou com o exoesqueleto de membro inferior, testado com sucesso em pacientes de síndrome pós-pólio. Como continuação desse trabalho realizado no Consejo Superior de Investigaciones Científicas (CSIC, Espanha) ele foi coordenador científico do projeto europeu ESBiRRo, voltado para o desenvolvimento de um robô bípede e um exoesqueleto de membro inferior com atuadores no quadril.
O projeto que está sendo desenvolvido na Poli conta com a participação de outros professores da instituição, como o prof. Tarcísio Coelho, além da colaboração do Instituto de Medicina Física e Reabilitação do Hospital das Clínicas da Faculdade de Medicina da USP.
Versões no mercado – De acordo com um artigo do coordenador geral das pesquisas, o professor Paulo Eigi Miyagi, do Departamento de Engenharia Mecatrônica e de Sistemas Mecânicos da Poli, em países desenvolvidos, os estudos estão mais avançados e as primeiras versões de exoesqueletos robóticos já começam a chegar ao mercado. Um deles é o HAL-5, feito no Japão. “É um exoesqueleto de ‘corpo inteiro’, desenhado para que idosos e pessoas com deficiência motora caminhem, subam escadas e realizem atividades diárias”, escreve o pesquisador da Poli.
“A estrutura incorpora motores elétricos para ombros, cotovelos, quadril e joelhos, tendo sua bateria autonomia de duas horas aproximadamente. E opera com dois sistemas de controle diferentes, um baseado em sinais de eletromiografia EMG e outro em padrões armazenados de movimento.”
Miyagi lembra, no entanto, que as aplicações dos exoesqueletos robóticos não se limitam a ajudar pessoas com deficiências motoras. Nos Estados Unidos, por exemplo, estão sendo desenvolvidos equipamentos desse tipo para uso militar. É o caso de exoesqueletos criados pela University of California em Berkeley, para as Forças Armadas americanas, com o objetivo de aumentar as capacidades físicas dos soldados como o Berkeley Lower Extremity Exoesqueleton (Bleex), o ExoHiker e o Human Universal Load Carrier (Hulc).

